Welcome to sinergym!
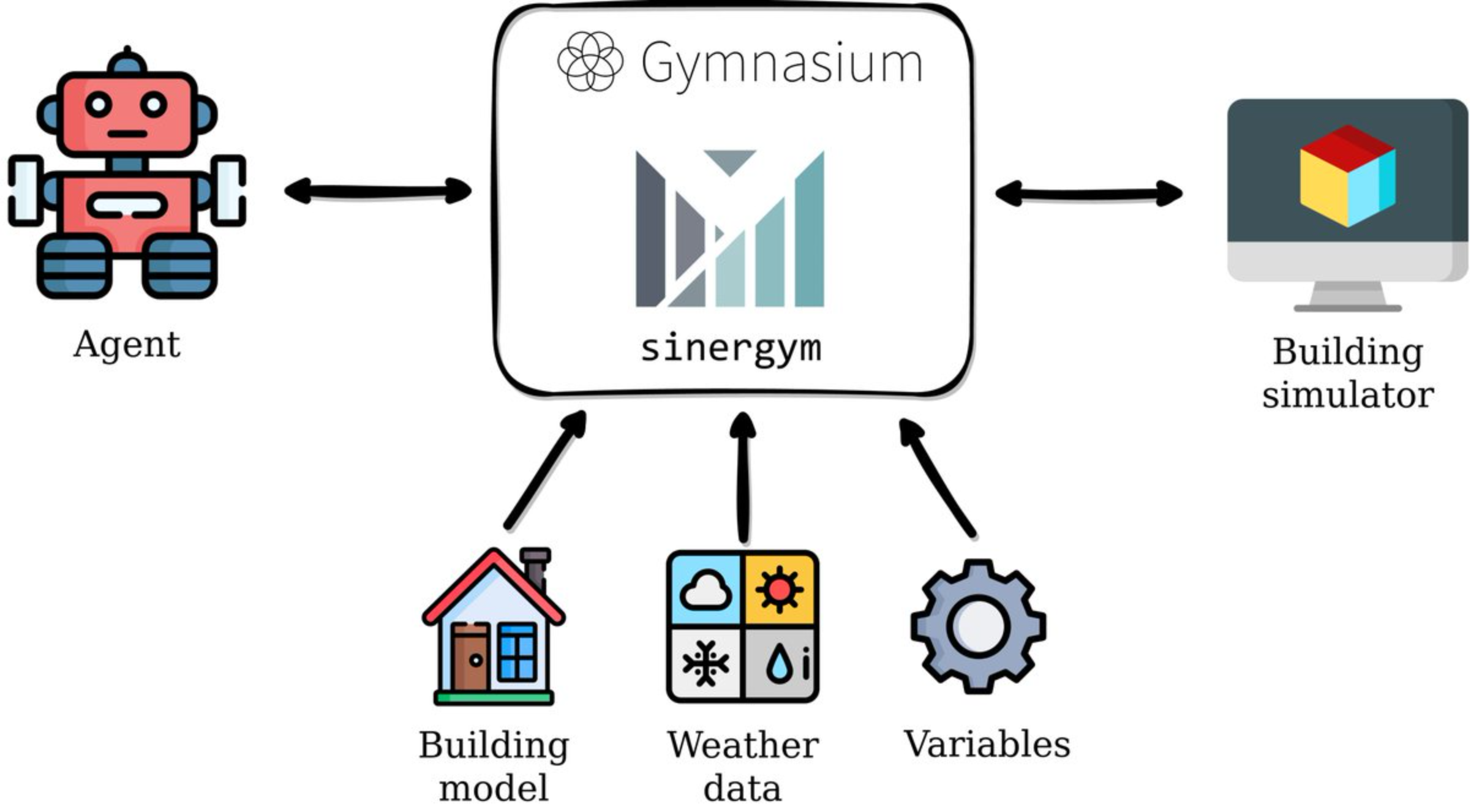
The goal of Sinergym is to create an environment following Gymnasium interface for wrapping simulation engines (EnergyPlus) for building control using deep reinforcement learning.




![]()





![]()
Note
Please, help us to improve by reporting your questions and issues here. It is easy, just 2 clicks using our issue templates (questions, bugs, improvements, etc.). More detailed info on how to report issues here.
The main functionalities of Sinergym are the following:
Compatibility with simulation engines. Communication between Python and EnergyPlus is established using Energyplus Python API as middleware. However, more of them (e.g. OpenModelica) could be included in the backend while maintaining the Gymnasium API in the future.
Benchmark environments. Similarly to Atari or Mujoco environments for RL community, we are designing a set of environments for benchmarking and testing deep RL algorithms. These environments may include different buildings, weathers, action/observation spaces, function rewards, etc.
Customizable environments. We aim to provide a package which allows modifying experimental settings in an easy manner. The user can create his own environments, combining his own building model, weather, reward, observation/action space, variables, actuators, environment name, etc. The user can also use these pre-configured environments available in Sinergym and change some aspect of it (for example, the weather) in such a way that he does not have to make an entire definition of the environment and can start from one pre-designed by us. Some parameters directly associated with the simulator can be set as extra configuration as well, such as people occupant, time-steps per simulation hour, run-period, etc.
Customizable components. Sinergym is easily scalable by third parties. Following the structure of the implemented classes, new custom components can be created for new environments such as function rewards, wrappers, controllers, etc.
Automatic Building Model adaptation to user changes. Many of the updates to the environment definition require changes to the building model (epJSON file) to adapt it to these new features before the simulation starts, which Sinergym will perform automatically. For example, using another weather file requires building location and design days update, using new observation variables requires to update the
Output:VariableandOutput:Meterfields, the same occurs with extra configuration context concerned with simulation directly, if weather variability is set, then a weather with noise will be used. These new building and weather file versions, is saved in the Sinergym output folder, leaving the original intact. In short, Sinergym automates the whole process of model adaptation so that the user only has to define what he wants for his environment.Automatic actuators control. Related to the above, it will only be necessary to specify the name of the actuators to be controlled through the actions of the Gymnasium interface, and Sinergym will take care of everything.
Extensive environment information. It is important that users can get some information about Sinergym background components from environment interface easily. From environment instance, it is possible to consult available schedulers, variables which compose an observation and action, whether simulator is running, the building run period, episode length, timesteps per episode, available building zones… And much more.
Stable Baseline 3 Integration. Some functionalities like callbacks have been customized by our team in order to test easily these environments with deep reinforcement learning algorithms and logger specific information about Sinergym environments. However, Sinergym is completely agnostic to any DRL algorithm and can be used with any DRL library that works with gymnasium interface.
Google Cloud Integration. Whether you have a Google Cloud account and you want to use your infrastructure with Sinergym, we tell you some details about how to do it.
Weights & Biases tracking and visualization compatibility. One of Sinergym’s objectives is to automate and facilitate the training, reproducibility and comparison of agents in simulation-based building control problems, managing and monitoring model lifecycle from training to deployment. WandB is an open-source platform for the machine learning lifecycle helping us with this issue. It lets us register experiments hyperparameters, visualize data recorded in real-time, and store artifacts with experiment outputs and best obtained models.
Notebooks examples. Sinergym develops code in notebook format with the purpose of offering use cases to the users in order to help them become familiar with the tool. They are constantly updated, along with the updates and improvements of the tool itself.
This project is accompanied by extensive documentation, unit tests and github actions workflows to make Sinergym an efficient ecosystem for both understanding and development.
Many more!
Important
If you want to introduce your own buildings in Sinergym, please visit Adding new buildings for environments section.
Note
This is a work in progress project. Stay tuned for upcoming releases!
Contributing
For all those interested in improving Sinergym, there are always improvements to be made. You can check issues in the repository.
If you want to contribute, please read CONTRIBUTING.md first.
Projects using Sinergym
The following are some of the projects benefiting from the advantages of Sinergym:
If you want to appear in this list, do not hesitate to send us a PR and include the following badge in your repository:
![]()
Examples
The examples can be run if you have your computer or container properly configured (see Installation section) from our notebooks hosted in the examples folder of the official Sinergym repository.
Citing Sinergym
If you use Sinergym in your work, please cite our paper:
@inproceedings{2021sinergym,
title={Sinergym: A Building Simulation and Control Framework for Training Reinforcement Learning Agents},
author={Jiménez-Raboso, Javier and Campoy-Nieves, Alejandro and Manjavacas-Lucas, Antonio and Gómez-Romero, Juan and Molina-Solana, Miguel},
year={2021},
isbn = {9781450391146},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3486611.3488729},
doi = {10.1145/3486611.3488729},
booktitle = {Proceedings of the 8th ACM International Conference on Systems for Energy-Efficient Buildings, Cities, and Transportation},
pages = {319–323},
numpages = {5},
}