Deep Reinforcement Learning Integration
Sinergym integrates some facilities in order to use Deep Reinforcement Learning algorithms provided by Stable Baselines 3. Current algorithms checked by Sinergym are:
Stable Baselines 3: |
|||
Algorithm |
Discrete |
Continuous |
Type |
PPO |
YES |
YES |
OnPolicyAlgorithm |
A2C |
YES |
YES |
OnPolicyAlgorithm |
DQN |
YES |
NO |
OffPolicyAlgorithm |
DDPG |
NO |
YES |
OffPolicyAlgorithm |
SAC |
NO |
YES |
OffPolicyAlgorithm |
TD3 |
NO |
YES |
OffPolicyAlgorithm |
Type column has been specified due to its importance about
Stable Baselines callback functionality.
DRL Logger
Callbacks are a set of functions that will be called at given stages of the training procedure. You can use callbacks to access internal state of the RL model during training. It allows one to do monitoring, auto saving, model manipulation, progress bars, …
This structure allows to custom our own logger for DRL executions. Our objective
is to log all information about our custom environment specifically.
Therefore, sinergym/sinergym/utils/callbacks.py
has been created with this proposal. Each algorithm has its own differences
about how information is extracted which is why its implementation. LoggerCallback
can deal with those subtleties.
Note
You can specify if you want Sinergym logger (see Logger) to record
simulation interactions during training at the same time using
sinergym_logger attribute in constructor.
This callback derives BaseCallback from Stable Baselines 3 while BaseCallBack
uses Tensorboard on the
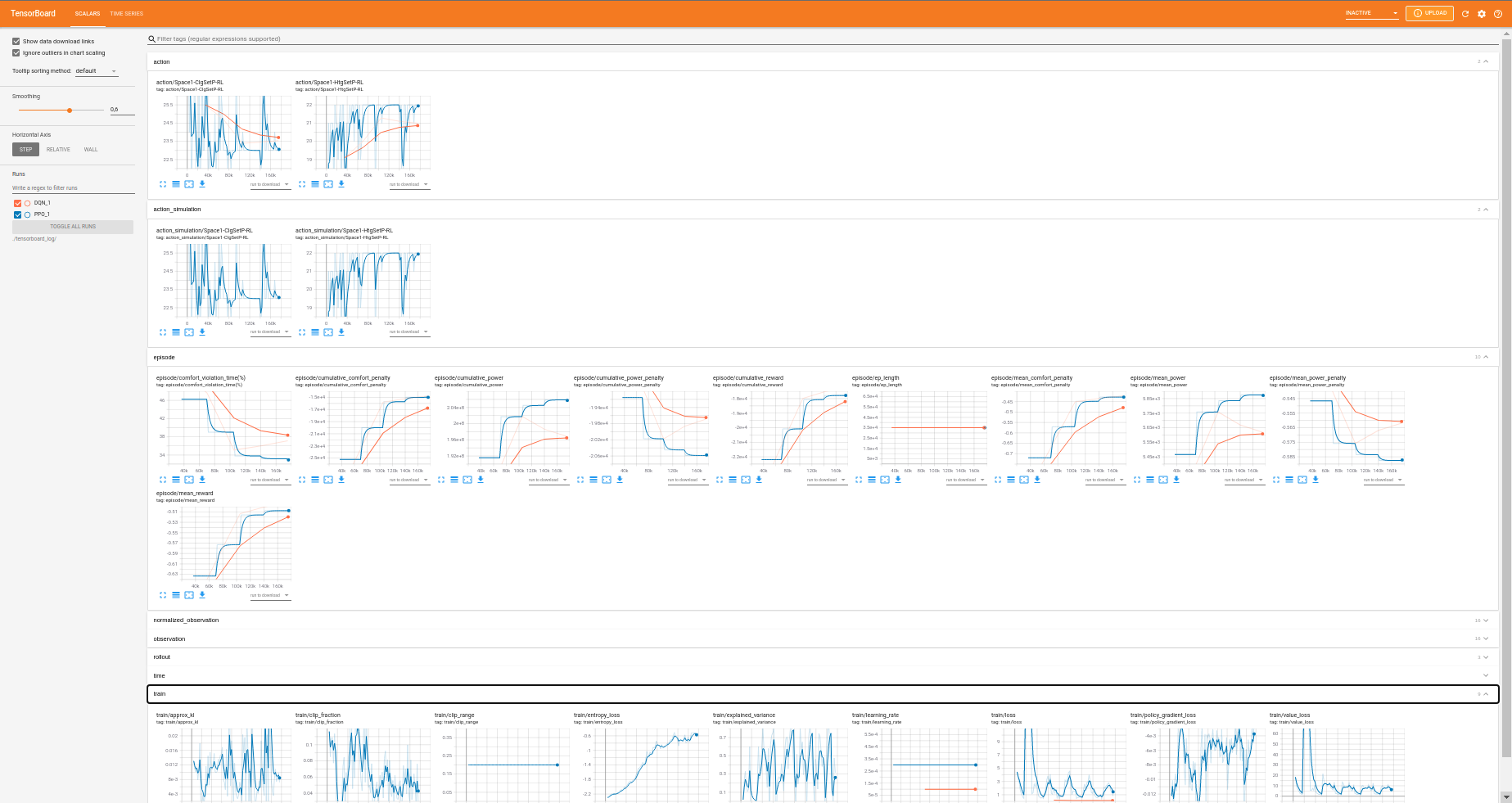
background at the same time. With Tensorboard, it’s possible to visualize all DRL
training in real time and compare between different executions. This is an example:
There are tables which are in some algorithms and not in others and vice versa.
It is important the difference between OnPolicyAlgorithms and OffPolicyAlgorithms:
OnPolicyAlgorithms can be recorded each timestep, we can set a
log_intervalin learn process in order to specify the step frequency log.OffPolicyAlgorithms can be recorded each episode. Consequently,
log_intervalin learn process is used to specify the episode frequency log and not step frequency. Some features like actions and observations are set up in each timestep. Thus, Off Policy Algorithms record a mean value of whole episode values instead of values steps by steps (seeLoggerCallbackclass implementation).
Tensorboard structure
The main structure for Sinergym with Tensorboard is:
action: This section has action values during training. When algorithm is On Policy, it will appear action_simulation too. This is because algorithms in continuous environments has their own output and clipped with gym action space. Then, this output is parse to simulation action space (See Observation/action spaces note box).
episode: Here is stored all information about entire episodes. It is equivalent to
progress.csvin Sinergym logger (see Sinergym Output format section):comfort_violation_time(%): Percentage of time in episode simulation in which temperature has been out of bound comfort temperature ranges.
cumulative_comfort_penalty: Sum of comfort penalties (reward component) during whole episode.
cumulative_power: Sum of power consumption during whole episode.
cumulative_power_penalty: Sum of power penalties (reward component) during whole episode.
cumulative_reward: Sum of reward during whole episode.
ep_length: Timesteps executed in each episode.
mean_comfort_penalty: Mean comfort penalty per step in episode.
mean_power: Mean power consumption per step in episode.
mean_power_penalty: Mean power penalty per step in episode.
mean_reward: Mean reward obtained per step in episode.
observation: Here is recorded all observation values during simulation. This values depends on the environment which is being simulated (see Observation/action spaces section).
normalized_observation (optional): This section appear only when environment has been wrapped with normalization (see Wrappers section). The model will train with this normalized values and they will be recorded both; original observation and normalized observation.
rollout: Algorithm metrics in Stable Baselines by default. For example, DQN has
exploration_rateand this value doesn’t appear in other algorithms.time: Monitoring time of execution.
train: Record specific neural network information for each algorithm, provided by Stable baselines as well as rollout.
Note
Evaluation of models can be recorded too, adding EvalLoggerCallback
to model learn method.
How use
You can try your own experiments and benefit from this functionality.
sinergym/scripts/DRL_battery.py
is a example code to use it. You can use DRL_battery.py directly from
your local computer specifying --tensorboard flag in execution.
The most important information you must keep in mind when you try your own experiments are:
Model is constructed with a algorithm constructor. Each algorithm can use its particular parameters.
If you wrapper environment with normalization, models will train with those normalized values.
Callbacks can be concatenated in a
CallbackListinstance from Stable Baselines 3.Neural network will not train until you execute
model.learn()method. Here is where you specify traintimesteps,callbacksandlog_intervalas we commented in type algorithms (On and Off Policy).DRL_battery.pyrequires some extra arguments to being executed like-envand-ep.You can execute Curriculum Learning, you only have to add
--modelfield with a valid model path, this script will load the model and execute to train.
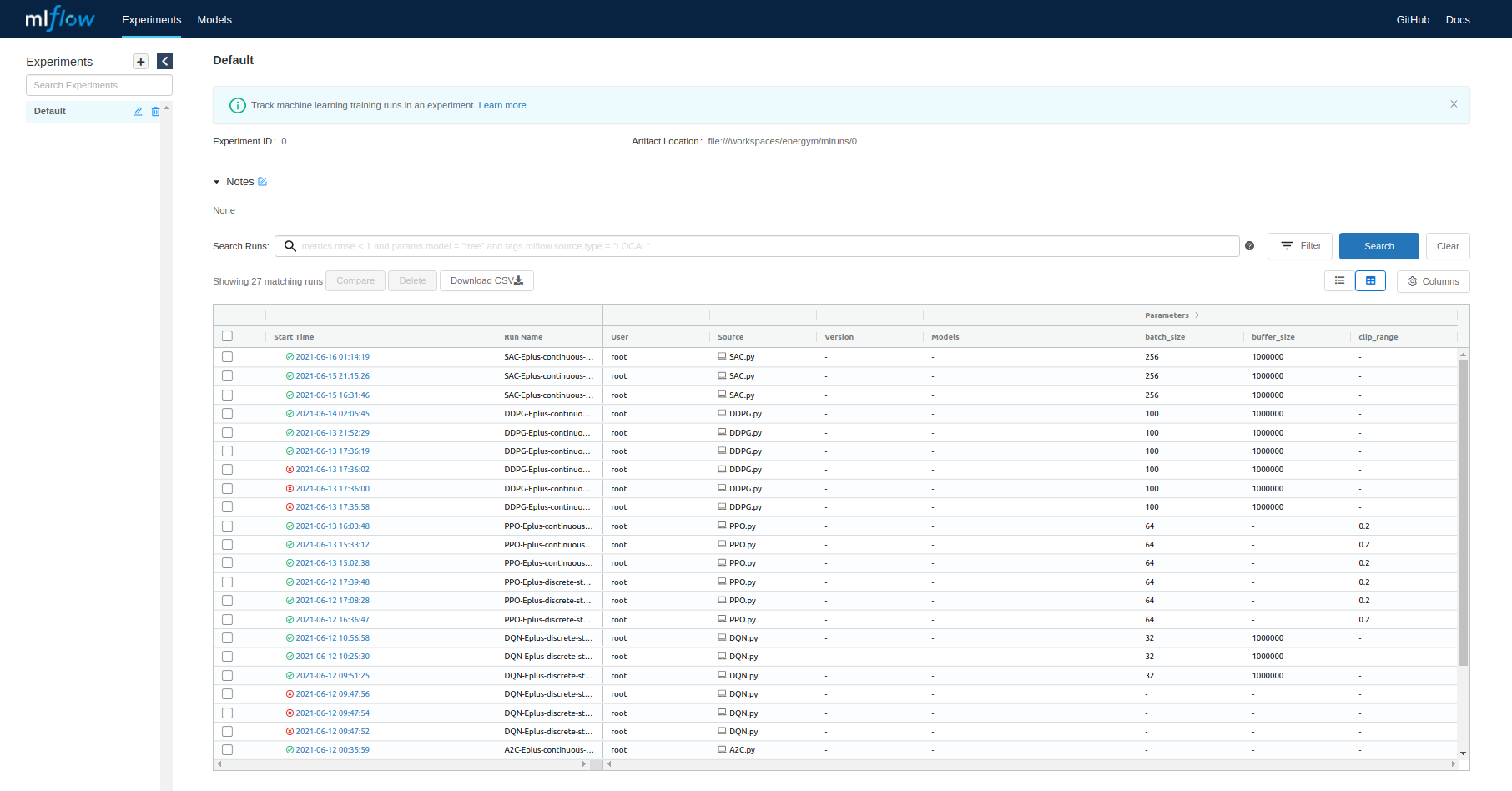
Mlflow
Our scripts to run DRL with Sinergym environments are using Mlflow in order to tracking experiments and recorded them methodically. It is recommended to use it. You can start a local server with information stored during the battery of experiments such as initial and ending date of execution, hyperparameters, duration, etc.
Here is an example:
Note
For information about how use Tensorboard and Mlflow with a Cloud Computing paradigm, see Remote Tensorboard log and Mlflow tracking server set up.
Note
This is a work in progress project. Direct support with others algorithms is being planned for the future!